Diferència entre revisions de la pàgina «Robot versió 6»
Salta a la navegació
Salta a la cerca

| Línia 15: | Línia 15: | ||
= Control des del NodeRED i MQTT = | = Control des del NodeRED i MQTT = | ||
== NodeRED == | == NodeRED == | ||
| − | |||
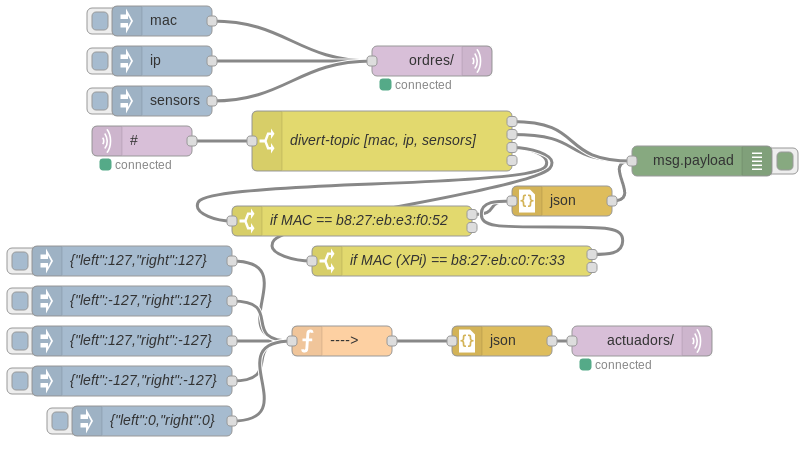
[[Image:Test00Robot6.nodered.png|center|Interacció del maquinari amb el NodeRED]] | [[Image:Test00Robot6.nodered.png|center|Interacció del maquinari amb el NodeRED]] | ||
[https://binefa.cat/training/robot_v6/Test00Robot6.nodered.txt Aquest flux del NodeRED] | [https://binefa.cat/training/robot_v6/Test00Robot6.nodered.txt Aquest flux del NodeRED] | ||
| + | == Python == | ||
[https://binefa.cat/training/robot_v6/codiRobot_v6_00.zip Codis d'interacció en Python] | [https://binefa.cat/training/robot_v6/codiRobot_v6_00.zip Codis d'interacció en Python] | ||
| + | |||
| + | == Interacció amb el maquinari == | ||
| + | Per a fer la comunicació entre el maquinari i el NodeRED cal executar: | ||
| + | /home/pi/code/robot/robot_01.py | ||
| + | |||
| + | Altrament, també es pot executar des dels nodes del NodeRED: | ||
| + | |||
| + | [[Image:CridaExec.nodered.png|center|Interacció del maquinari amb el NodeRED]] | ||
Revisió del 11:55, 25 set 2019
Contingut
Robot
Aquesta és la sisena versió del robot educatiu dissenyat conjuntament per Edco i els professors Carles Olivé i Jordi Binefa de l'Escola del Clot - Jesuïtes El Clot.
Aquest robot està pensat per a funcionar amb un Arduino Nano o una Raspberry Pi Zero W.
La darrera versió dels codis per a fer-lo funcionar són al dipòsit d'Arduino i al dipòsit de la Raspberry Pi.

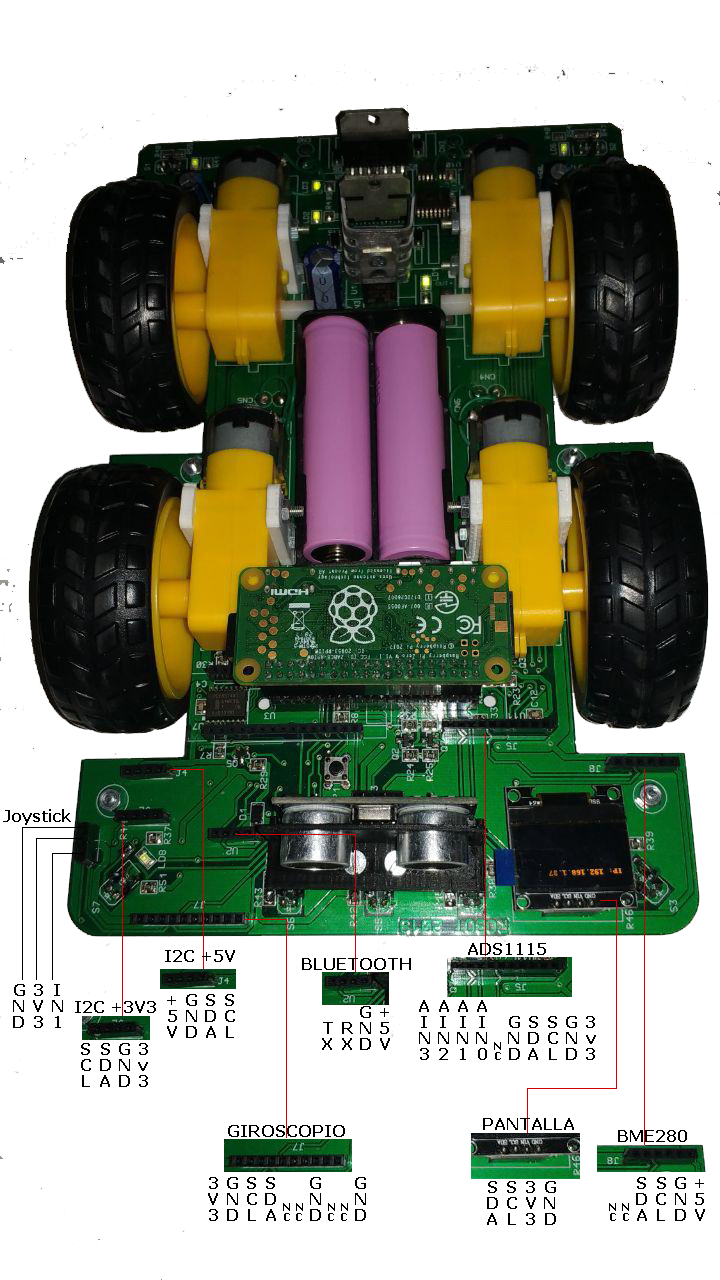
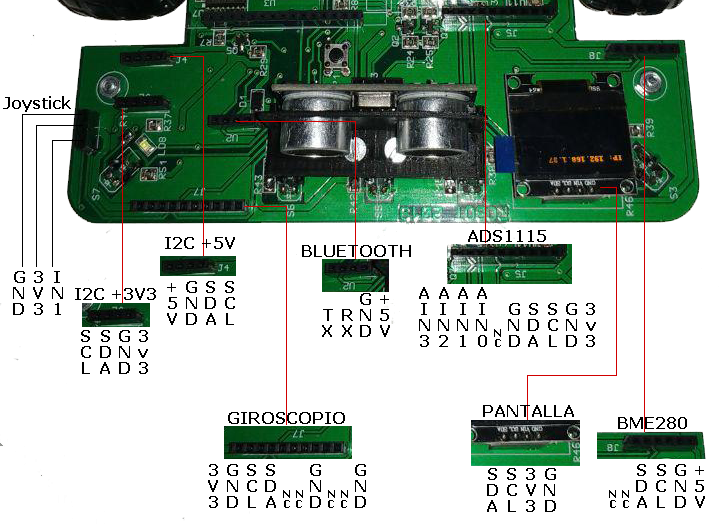
Connexions

Esborrany de l'esquema electrònic
Control des del NodeRED i MQTT
NodeRED

Python
Interacció amb el maquinari
Per a fer la comunicació entre el maquinari i el NodeRED cal executar:
/home/pi/code/robot/robot_01.py
Altrament, també es pot executar des dels nodes del NodeRED:
